Contactless Handling of Small Parts in Clean Rooms
Conventional handling systems often cause contamination or surface damage. ZS-Handling’s system featuring the MicroLevi gripper avoids both problems by using negative pressure and a patented ultrasound bearing.
Posted: September 24, 2020


Handling systems that use compressed air, such as Bernoulli grippers, often introduce particle contamination. Vacuum grippers can leave traces such as marks or scratches. ZS-Handling GmbH (Regensburg, Germany) systems avoid both issues by using ultrasonic air bearing technology to move extremely thin, flexible, fragile, and wavy semiconductor substrates without touching them.
The company’s patented ultrasonic bearing “floats” substrates on an air film generated by vibrations. Through a combination of negative pressure and ultrasound, attracting and repulsive forces act simultaneously on the workpiece to keep it at a distance even when gripping from above.
A sonotrode creates a supporting thin gas film (air or process gas) between the sonotrode surface and the substrate. The substrate floats on the gas film at distances of 10 μm to 150 μm. The physics of the ultrasonic bearing results from the flow dynamics and not from acoustic principles. The gas pressure in the gap between the workpiece and the vibrating surface increases due to the film’s compression and decompression. Because a uniform oscillation pattern generates constant floating forces over the entire sonotrode, vibrations aren’t transmitted into the substrate.
The ultrasonic bearing’s repulsive forces move the substrate at very high speeds without friction. In combination with vacuum, attractive forces can be simultaneously applied to enable handling from above. Flexible materials can be “smoothed” – kept in an even, centered position – without contact.
For very small components (up to approx. 12×12 mm), the self-centering effect is effective when the gripper tip is precisely adjusted, which means side stops aren’t required even for very precise positioning.
The force profile is similar to that of a conventional air bearing, but compressed air supply isn’t required. Unlike with Bernoulli grippers, laminar air flow in clean room environments isn’t disturbed by high flow velocities, and particles from external air or pipes can’t penetrate.
The handling system can be used in all atmospheric processes and in up to 20% partial vacuum processes.
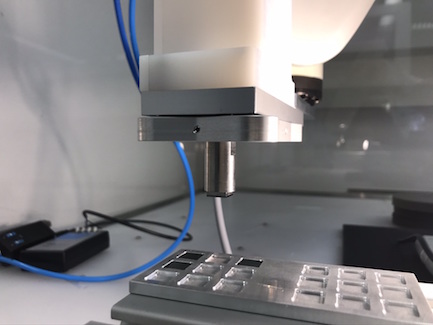
The company’s solution includes the MicroLevi gripper with different tips for the different sizes, which can be easily exchanged using a collet chuck. With ultrasound and vacuum at the same time, the die can be gripped from above and held and swiveled without contact.
Due to the self-centering effect at the gripper tip, the die can be gripped and precisely placed even at rapid accelerations of over 2g. To achieve optimal centering, the tip must be adapted exactly to the die’s format; therefore, three gripper tips are necessary. The gripper can be connected to any robot or axis system by an adaptable flange.
Subscribe to learn the latest in manufacturing.
Industry News